El único límite tiene que ser nuestra imaginación.
Dr. Carlos Alberto Díaz. Profesor Titular Universidad ISALUD.
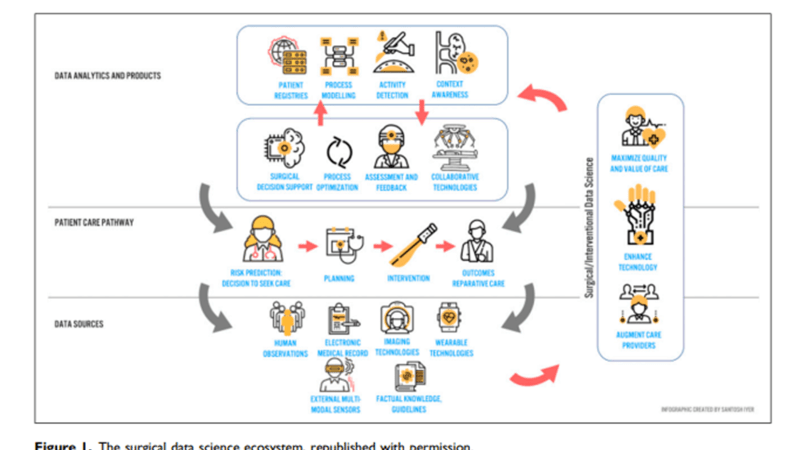
Este sistema 4.0 involucrará todas las posibilidades de reunir datos de pacientes, parámetros vitales, glucémicos, respiratorios, del ritmo cardíaco, adherencia al tratamiento, conductuales, del domicilio, de poblaciones, definir claramente los requerimientos, incrementar la vigilancia en pacientes con demencia, parámetros, mediciones, comunicación de y con los médicos y los domicilios bidireccionalmente, con sus otros dispositivos de atención funcionando como un enlace indispensable entre el paciente su familia y el sistema de atención, implica detección, fusión, análisis e interpretación de datos.
Varios anillos digitales, que incrementarán la seguridad de los pacientes y la calidad de atención, facilitando la tarea de los profesionales, que estarán más respaldados, que tendrán más información de los pacientes que tienen bajo su responsabilidad. Sencillamente es apasionante y salvo la mala utilización que regímenes controladores, puedan ejercer sobre ello, no ofrece desventajas. si, por supuesto la conectividad tendrá que mejorar exponencialmente, tendrá que existir competencia, y ser un servicio esencial como la electricidad, el gas y la telefonía. Se trabaja, se estudia y se vive interconectado. Esto no es malo en tanto sirva de red de contención de los seres humanos, y estas redes contribuyan fuertemente al logro del bienestar de las personas y mejorar su calidad de vida, el desarrollo de la sociedad, los sistemas tienen que ser asequibles y relacionados con su cobertura de salud, para estos también es un ahorro fenomenal de los costos, mejora en la calidad de atención, aumento del tiempo de relación de las personas con su sistema de salud. Los veo como los puentes virtuales para superar la fragmentación.
Reunión de datos, imágenes, historia clínica, farmacia, dispositivos, monitoreo remoto, evaluación de calidad de vida, empleo de dispositivos ajustables y customizables, internet con su domicilio, trabajo y sistema de atención, teleconsulta, telemonitoreo, teleseguimiento, inteligencia artificial, elaboración de corredores sanitarios y atenciones programadas, conciliación de medicación y adherencia al tratamiento, evaluación de la respuesta.
Evolución:
Healthcare 1.0 aportó las soluciones a los principales problemas de salud pública. Los enfoques se basaron en pruebas y se volvieron más inteligentes. Esto incluyó la prevención de enfermedades infecciosas mediante la vacunación y la limpieza del agua potable.
Healthcare 2.0 se centró más en mejorar lo logrado. Las terapias se volvieron ampliamente disponibles y los antibióticos aparecieron en el mercado. Los médicos no solo se volvieron mejores y más profesionales, sino que también comenzaron a especializarse en subdominios para mejorar el tratamiento de afecciones más complicadas.
Healthcare 3.0 es cuando la tecnología comenzó a abrirse camino en la medicina. A medida que las computadoras se hicieron más pequeñas, se usaron en más y mejores dispositivos. Las enfermedades se descubrieron antes y con mayor precisión. Al mismo tiempo, Internet proporcionó a la atención médica acceso continuo y almacenamiento de datos.
Motivado por la Industria 4.0, Healthcare 4.0 se estableció con una visión notable que se centra principalmente en utilizar la personalización y las virtualizaciones entre varios sectores industriales. Medical 4.0 se perfila como la cuarta revolución médica.
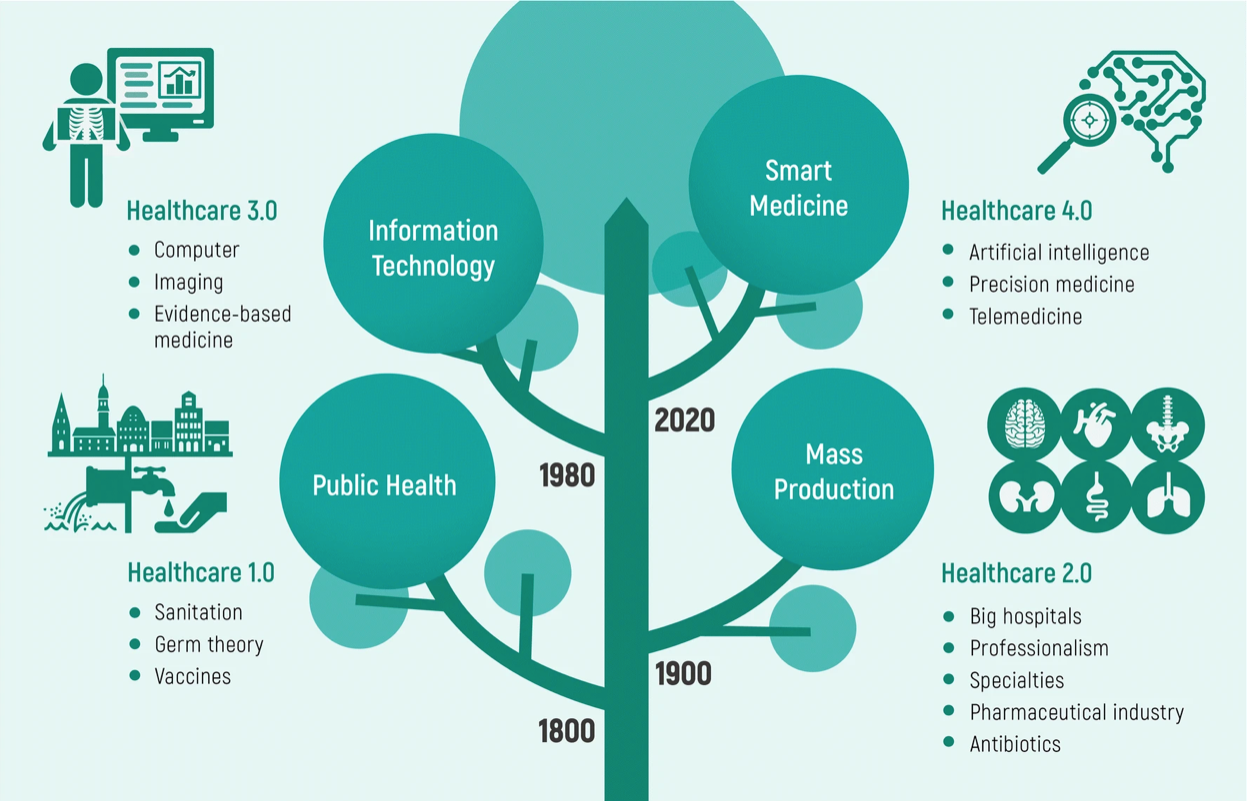


El cambio de paradigma de diseño permite que los cuidadores formales e informales, más servicios de atención médica digitales y empresas o institutos más amplios se creen y participen en Healthcare 4.0, que tiene como objetivo hacer realidad la visión definitiva del 8-P Healthcare: preventivo, predictivo, atención sanitaria participativa, centrada en el paciente, personalizada, de precisión, preventiva y omnipresente .
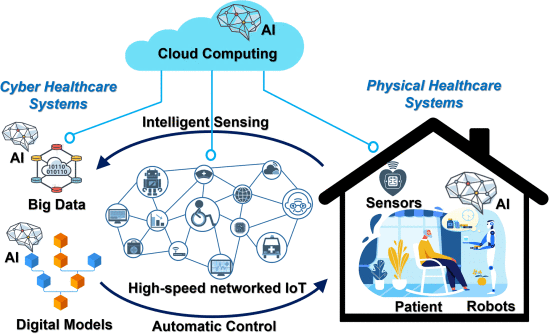
Paciente en su domicilio con sensores, cámaras con sistemas físicos de cuidado de la salud, que envía datos a su red de sistema asistencial, que procesa esos datos constantemente, lo vuelca en sus antecedentes, y los procesas por sistemas de inteligencia artificial, bot y algoritmos, muy útil, par gestionar la enfermedad o bien la polipatología y la multimorbilidad.
Cambiará el diseño de los sistemas de salud. El paradigma de diseño del sistema sanitario ha cambiado fundamentalmente de bucle abierto a bucle cerrado, de bucle pequeño a bucle grande, y de bucle único a bucles múltiples.
En los últimos años de desarrollo de hogares inteligentes para la atención domiciliaria, se han desarrollado considerables dispositivos y sistemas de un solo punto. Estos dispositivos y sistemas pueden proporcionar la función de recopilación y análisis de datos para el monitoreo del entorno doméstico, seguimiento de la actividad diaria, evaluaciones del estado de salud, control remoto de dispositivos. En general, existe una falta de automatización en términos de la toma de decisiones y la ejecución que actualmente están dominadas por humanos, lo que se denomina “ciclo abierto”. Los nuevos paradigmas están surgiendo en la atención médica para marcar un cambio de época en el dominio, es decir, cada vez más dispositivos de atención médica en red de alta velocidad impulsados por inteligencia artificial se están apoderando de los humanos en términos del papel para la toma de decisiones y la ejecución, que se llama «bucle cerrado».
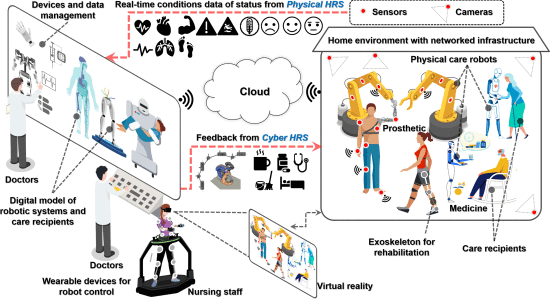
Concepto del CPS-HRS, compuesto de HRS cibernético y HRS físico. El flujo de información en el CPS-HRS es bidireccional. Los dispositivos y los datos se gestionan y analizan respectivamente de acuerdo con los datos de estado en tiempo real transferidos de HRS físico a HRS cibernético. Los robots y dispositivos en HRS físico están conectados y controlados por la retroalimentación generada por el modelo digital de sistemas robóticos y receptores de atención de HRS cibernético. Como se muestra en la Figura 2 , el sistema robótico de atención domiciliaria basado en CPS (CPS-HRS) está experimentando un cambio de paradigma de diseño de los bucles abiertos, pequeños y únicos a los bucles cerrados, grandes y múltiples que reflejan más la atención holística, donde los humanos y los robots comparten sus capacidades e inteligencia. Un sistema de acoplamiento ciberfísico típico consta de tres partes: la parte cibernética, la parte física y los módulos de interacción ciberfísica.
Estas tres partes están estrechamente conectadas a través de esos bucles. La parte cibernética incluye hardware / software de detección, actuación, computación y comunicación. La parte física está formada por personas que reciben cuidados, médicos, familiares y robots. Los módulos de interacción ciberfísica están compuestos por módulos de procesamiento, análisis y transmisión de datos, módulos de interfaz y módulos de control. El propósito final del uso de la infraestructura cibernética es monitorear de manera inteligente y automática (de lo físico a lo cibernético) y controlar (de lo cibernético a lo físico) el sistema robótico de atención domiciliaria física a través de módulos de interacción, dándose cuenta de los circuitos cerrados de la revolución mencionada anteriormente. El objetivo del CPS-HRS es establecer un nuevo sistema de apoyo a los servicios de atención domiciliaria computacionales y cognitivos basados en la robótica.
Captura de movimiento para análisis de comportamiento
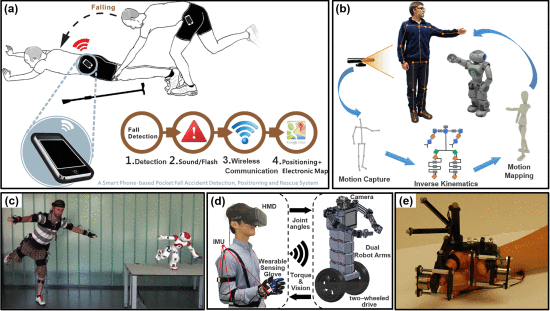
El análisis del comportamiento humano de los ancianos u otros cuidadores en el hogar es un componente importante de CPS-HRS. La captura de movimiento es una forma eficaz de permitir el seguimiento del comportamiento de las personas mayores en un entorno más natural [125] . Los avances en la tecnología de sensores durante los últimos años han proporcionado nuevas formas de monitorizar a las personas mayores en entornos domésticos no controlados [126] . Los sensores basados en la visión y los sensores portátiles son dos métodos principales de captura de movimiento [127] . Los sensores se han vuelto más pequeños, más baratos y portátiles, que forman una red corporal de sensores para promover la aplicación práctica de la atención domiciliaria de captura de acción dinámica. La captura de movimiento en el CPS-HRS puede monitorear la progresión de la enfermedad a través del análisis del comportamiento [126]. Además, la detección confiable de caídas, la prevención de caídas y la notificación de asistencia de emergencia se pueden lograr basándose en la captura de movimiento. El uso de un detector de accidentes de caída de bolsillo basado en un teléfono inteligente para detectar caídas es típico, como se muestra en la Fig. 6 (a) [130] . Estas aplicaciones mejoran la calidad de vida de las personas mayores.
Mapeo de movimiento para teleoperación
La captura de movimiento es el proceso de obtener los datos de movimiento del operador, mientras que el mapeo de movimiento convierte el movimiento del operador en el movimiento del robot basándose en los datos de movimiento obtenidos [131] . Los robots humanoides con diferentes morfologías corporales serán un componente importante en CPS-HRS. Transferir el movimiento humano a robots humanoides es una forma prometedora hacia la programación intuitiva [132]. Para controlar el robot de manera eficaz, los datos de captura de movimiento deben convertirse al formato que se puede programar en el controlador de bajo nivel del robot. La posición-orientación del punto central de la herramienta (TCP) y los ángulos de articulación son dos tipos comunes de datos programados para el control robótico. Se puede obtener una posición precisa mapeando los datos de posición-orientación de la mano del operador al TCP de un robot humanoide. Se puede generar un movimiento similar al humano estableciendo la relación de mapeo entre el modelo de Denavit-Hartenberg (DH) del robot humanoide y el operador [133] . La figura 6 (b) ilustra el progreso del mapeo de movimiento del robot humanoide de teleoperación NAO (SoftBank Robotics Inc. [134]) basado en los datos de movimiento obtenidos de Kinect (Microsoft Inc. [135] ). Además, considerando el movimiento de todo el cuerpo de los robots humanoides, para realizar el mapeo de movimiento cinemático básico, también se deben considerar los factores dinámicos relacionados para asegurar la estabilidad de los robots humanoides en el proceso de caminar [131] . La figura 6 (c) muestra el sistema de teleoperación de cuerpo entero que permite a una NAO imitar movimientos complejos de cuerpo entero de humanos en tiempo real.
C.Captura de movimiento en tiempo real para teleoperación
Como se describe en las nuevas características de CPS-HRS, la tecnología de teleoperación será una parte importante de la aplicación práctica de la atención domiciliaria. Como método para controlar de forma remota un robot que interactúa con entornos inciertos, la teleoperación es una arquitectura humana en el circuito [136] . El robot de atención domiciliaria sigue siendo difícil de programar, aunque están surgiendo ejemplos de métodos de programación avanzados, como aplicaciones de arrastrar y soltar [131] . Sería útil si el robot pudiera aprender habilidades humanas y utilizar la capacidad de adaptación al medio ambiente del ser humano. Un método prometedor es que el robot puede seguir el movimiento humano en tiempo real. Para lograr este objetivo, el movimiento humano debe capturarse en tiempo real [137]. Los sensores adicionales basados en la visión y los sensores fijos en el cuerpo humano son los dos métodos más utilizados para la captura del movimiento humano en tiempo real [138] . Los sistemas de captura de movimiento basados en imágenes son relativamente sencillos, pero se basan en una configuración controlada con múltiples sensores fijos. Los sensores fijos portátiles tienden a ser costosos e inconvenientes y limitarán el funcionamiento real [133] . Con el fin de controlar las pinzas u otros efectores de extremo de un robot, algunos dispositivos para la captura de los datos de movimiento de las manos humanas, tales como los guantes de datos mostrados en la Fig. 6 (d) y el exoesqueleto se muestra en la Fig 6 (e) han sido desarrollado [139]. En el futuro, con el desarrollo y la adopción de la informática de punta, la tecnología de captura de movimiento capturará intuitivamente las intenciones de los operadores sin costos de capacitación adicionales. La tecnología de teleoperación basada en la captura de movimiento traerá más aplicaciones novedosas a la atención domiciliaria remota.
- En primer lugar, está el problema de la seguridad y la privacidad de los datos sanitarios para abordar y gestionar los nuevos riesgos de ciberseguridad, especialmente con el uso cada vez mayor de servidores basados en la nube y la proliferación de la conectividad inalámbrica [143] .
- Un segundo tema está relacionado con la identificación de sesgos en los conjuntos de datos de atención médica, especialmente con respecto a las variaciones socioeconómicas, educativas, étnicas y geográficas. Si tales sesgos no se resuelven adecuadamente, sería difícil abordar las diferencias en la atención y los resultados entre estos diferentes grupos de población.
- Un tercer problema está relacionado con la precisión y la calidad de los datos que deben verificarse antes de aplicarlos en modelos de IA. Por lo tanto, necesitamos verificar tanto la precisión como la coherencia de los datos etiquetados. Para los datos de entrenamiento, se requiere coherencia para garantizar que las etiquetas coincidan entre sí y sean precisas. Generalmente, la precisión se mide comparando los datos etiquetados con un subconjunto de los datos de entrenamiento que han sido etiquetados por científicos o expertos en datos.
- Un cuarto problema está relacionado con la intuición de los profesionales sanitarios experimentados que son muy difíciles de capturar y almacenar como BHD. La intuición a menudo se desarrolla a través de experiencias, razonamientos y pensamientos no analíticos, sentimientos, una base sólida de conocimientos y una creación de conocimientos no lineal. En el cuidado del paciente, la intuición es muy valiosa y se utiliza a menudo porque, cuando se necesita, reaparece en forma de «inteligencia intuitiva» o «intuiciones». Sin embargo, debido a que la intuición es muy difícil de capturar o cuantificar y, por lo tanto, se almacena para que luego se pueda descubrir o extraer como con otros BHD; El conocimiento intuitivo a menudo se considera no científico y no es adecuado en investigaciones científicas, incluida la asistencia sanitaria.
- Un quinto problema está relacionado con que los médicos experimentados puedan identificar señales médicas no tradicionales, como señales emocionales, patrones de habla y señales de comportamiento, y que utilicen esta información en el diagnóstico y el tratamiento. Otro ejemplo de tales señales no médicas está relacionado con factores secundarios que incluyen el estado emocional y de alerta, el compromiso, el tono de la piel y los patrones de respiración que son todos importantes al alimentar a un paciente. Actualmente, es muy difícil para los sistemas sanitarios robóticos humanoides basados en IA recopilar, documentar y utilizar con precisión tales factores secundarios.
- Un sexto problema está relacionado con el sesgo de los desarrolladores de algoritmos y la diversidad y heterogeneidad de los grandes datos utilizados para entrenar a HRS. Esto puede parecer paradójico porque la inteligencia artificial se propuso como una solución al sesgo, ya que se supone que las computadoras son imparciales. Sin embargo, el software inteligente de autoaprendizaje podría entrenarse con datos incorrectos o sesgados o con datos para otorgar ventajas a un segmento de la población. Por lo tanto, la diversidad y heterogeneidad de big data, que también es representativa de la población para la que se utilizará, es necesaria para entrenar el software inteligente para aplicaciones como los sistemas robóticos de atención domiciliaria. Pero incluso con salvaguardias para tal sesgo, que puede considerarse un sesgo consciente, protegerse contra el sesgo inconsciente es mucho más difícil. Algunas soluciones incluyen observar las predicciones de IA que son contrarias a la realidad para garantizar que no estén codificadas con sesgo. Esto implica una estrecha cooperación entre muchos expertos, incluidos científicos de datos, investigadores de inteligencia artificial y científicos sociales.
Sin embargo, a pesar de estos desafíos, las perspectivas futuras del HRS automatizado basado en IA son muy brillantes.

Estando en un etapa avanzada de mi vida profesional, observo junto a los cambios demográficos, epidemiológicos y tecnológicos con optimismo, ilusión, y avizorando el presente de una nueva era, definitivamente distinta, y estará en nuestra determinación, conciencia, ética, responsabilidad, honestidad que sea para el bien de la sociedad, que disminuya las desigualdades e instale un modelo prestacional más integrado, e integral, y que los pacientes no abandonen el radar episódico de la atención médica de los agudos.
