Pantalone, D., Faini, G.S., Cialdai, F. et al. Robot-assisted surgery in space: pros and cons. A review from the surgeon’s point of view. npj Microgravity 7, 56 (2021). https://doi.org/10.1038/s41526-021-00183-3
El objetivo del vuelo humano en el espacio ha cambiado de permanencia en la Estación Espacial Internacional a misiones más allá de la órbita terrestre baja y el Lunar Gateway para la exploración del espacio profundo y misiones a Marte. Hubo que considerar varias condiciones que afectaban a las misiones espaciales: por ejemplo, el efecto de la ingravidez y las radiaciones en el cuerpo humano, las disminuciones de la salud conductual o la latencia de la comunicación, y el reabastecimiento de consumibles. También hubo que considerar la telemedicina y las aplicaciones telerobóticas, la cirugía asistida por robot con algunas pistas sobre procedimientos quirúrgicos experimentales llevados a cabo en misiones anteriores. La necesidad de una mayor autonomía de la tripulación en temas de salud está relacionada con la creciente gravedad de las intervenciones médicas y quirúrgicas que podrían ocurrir en estas misiones, y se recomendaría la presencia de un cirujano altamente capacitado a bordo. Un robot quirúrgico podría ser una ayuda valiosa, pero solo en la medida en que esté provisto de múltiples funciones, incluida la capacidad de realizar ciertos procedimientos de forma autónoma. Las misiones espaciales en el espacio profundo o en otros planetas presentan nuevos desafíos para la salud de la tripulación. Proporcionar un robot quirúrgico multifunción es la nueva frontera. La investigación en este campo allanará el camino para el desarrollo de nuevos planes estructurados para la salud humana en el espacio, así como proporcionar nuevas sugerencias para aplicaciones clínicas en la Tierra.
Introducción
Durante más de 50 años la exploración espacial ha ido creciendo, permitiendo nuevos logros en ciencia y tecnología básica que demostraron ser útiles también para cuestiones de la Tierra, en sectores como1 atención médica, creación de empleos espaciales, mejoras tecnológicas en los productos cotidianos, pronósticos meteorológicos y comunicaciones, datos satelitales sobre el cambio climático y predicción de desastres naturales. Por ejemplo, en 2020 Anderson et al.2 proporcionó una visión general de los nuevos logros de la telerobótica, la ciencia planetaria y los vuelos espaciales humanos. En el sector de las comunicaciones, la tecnología de telepresencia permite la exploración humana en múltiples sitios, incluidos aquellos considerados demasiado peligrosos para los astronautas. En la Tierra, esta tecnología apoyará la exploración humana en entornos hostiles, reduciendo costos y riesgos.
La salud de los astronautas, tanto durante vuelos espaciales a largo plazo como durante asentamientos en otro planeta, es uno de los temas en estudio. Sin embargo, las políticas de un rápido retorno a la Tierra3,4, actualmente adoptado en la Estación Espacial Internacional (ISS) en órbita terrestre baja (LEO) ya no puede ser la opción elegida, ya que las crecientes distancias desde la Tierra harán imposible cualquier tipo de apoyo terrestre. En este artículo, consideramos el papel de la cirugía asistida por robot como una ayuda valiosa para los astronautas en misiones a largo plazo y misiones en otro planeta. Un examen de los efectos de la ingravidez y la ausencia de gravedad, así como el retraso de la señal y el nivel de autonomía de la tripulación completan la revisión.
En particular, debe decirse que, aunque es deseable la presencia de un cirujano experimentado calificado que brinde asistencia médica y realice procedimientos quirúrgicos, no puede darse por sentado.3,4. La disponibilidad de un robot quirúrgico podría ser útil, aunque el concepto detrás de la cirugía asistida por robot es diferente al que estamos acostumbrados en la Tierra.5. De hecho, los sistemas quirúrgicos robóticos actualmente presentes en nuestra sala de operaciones (OR) en la Tierra son demasiado voluminosos y pesados para los vuelos espaciales y necesitan espacio y asistencia por parte de personal calificado para permitir que el operador realice la cirugía.
Estos robots son dispositivos teleoperados maestro-esclavo, pero la investigación espacial ha estado desarrollando robots quirúrgicos multifuncionales preprogramados y más autónomos, capaces de realizar procedimientos de forma autónoma.5,6. Además de realizar procedimientos quirúrgicos básicos, como la sutura, deben proporcionar instrumentación diagnóstica e interpretación para ultrasonido, tomografía computarizada (CT) o resonancia magnética (MRI)5,6 y también ser capaz de dar apoyo en la anestesia y el monitoreo de signos vitales, ya que el Oficial Médico de la Tripulación (CMO) podría estar solo en el cuidado de astronautas gravemente enfermos o heridos.
Temas de encuadre
Sugerencias sobre los efectos de la microgravedad (μg) y la gravedad 0 (0 g) en la fisiología del cuerpo humano
La microgravedad (μg) es la condición en la cual las personas u objetos parecen ser ingrávidos.7. La ingravidez es una condición en la que los desafíos fisiológicos acostumbrados debido al vector de gravedad, al que el cuerpo humano está sujeto diariamente en la superficie de la Tierra, están ausentes.7. La condición normal de 1 G afecta al cuerpo humano y los sistemas cardiovascular, pulmonar, neurovestibular y musculoesquelético presentan sensibilidad específica o particular a ella3,7,8,9,10. El cuerpo humano muestra varias alteraciones debido a los efectos de la microgravedad3,7,8,9,10. No hay diferencias en las respuestas fisiológicas entre la microgravedad en LEO y la gravedad cero más allá de las fuerzas gravitacionales planetarias. Los fluidos corporales tienen un cambio y la compensación cardiovascular produce una distribución de líquidos con aumento del volumen sanguíneo en la cabeza y los vasos torácicos. La reducción de la carga de trabajo del corazón durante los vuelos espaciales de larga duración debido a la ausencia de gravedad conduce a una disminución de la masa miocárdica general3,7,8. También el sistema musculoesquelético se ve afectado por la ausencia de fuerzas gravitacionales convencionales, mostrando atrofia de huesos y músculos de soporte, con predisposición a fracturas patológicas durante la actividad física o retorno a la gravedad normal3,7. La desregulación inmune también está presente con la leucocitosis durante y después del vuelo espacial, lo suficientemente significativa como para producir una mayor susceptibilidad a las infecciones bacterianas y virales.3,7. Además, la adaptación a la ingravidez produce una disfunción neurovestibular conocida como sikness del movimiento espacial.7. Muchas otras modificaciones ocurren durante la permanencia en el espacio7, debido a diferentes causas, como cambios en la actividad física, gasto de energía, modificación de las extremidades después del cambio de líquido y cambios musculares. La antropometría del tórax y el abdomen también cambia: el tórax presenta una forma de «barril» con elevación diafragmática de uno o dos espacios intercostales, mientras que el abdomen muestra un contorno «aplanado» con ubicación rostral de hígado y bazo a la palpación7. También la columna vertebral presenta un cambio para la expansión de los discos intervertebrales y la pérdida de la curvatura toracolumbar debido a la condición de descarga7.
Entre otros procesos es importante recordar que la cicatrización de heridas se ve afectada en el espacio11,12. Aunque la literatura sobre la cicatrización de heridas en la ingravidez es relativamente pobre, los estudios en modelos animales en células inmunes, fibroblastos, células endoteliales y epiteliales cultivadas tanto en condiciones reales como en μg modeladas, muestran alteraciones en fagocitosis, adhesión/migración, apoptosis, proliferación, diafonía intercelular, producción de mediadores inflamatorios, moléculas de matriz extracelular, factores de crecimiento, etc.11,12 (Fig. 1).
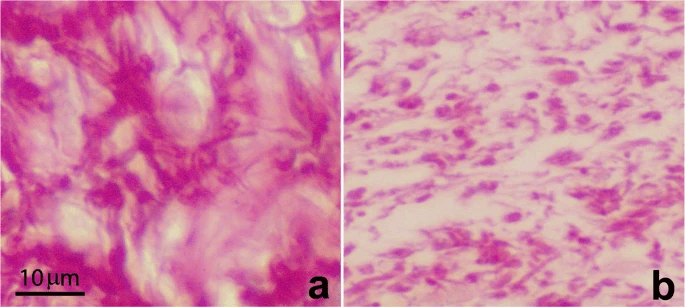
El efecto de la exposición a condiciones de microgravedad modeladas en un modelo in vivo de cicatrización de heridas (Hirudo Medicinalis): contenido de fibras de colágeno en el sitio de la herida en 1 x g de control (a) y muestra expuesta a microgravedad (b). La exposición a la microgravedad modelada induce una disminución significativa en el contenido de fibras de colágeno con una evidente desorganización de la red de fibras. Tinción de rojo Picrosirius.
Consejos sobre estudios quirúrgicos
Si bien anteriormente la probabilidad de un evento en vuelo que requeriría una operación quirúrgica durante una misión de larga duración era pequeña, el advenimiento de un proyecto lunar, la exploración del espacio profundo y las misiones a otro planeta, es decir, Marte, ha aumentado la probabilidad de eventos traumáticos durante los vuelos espaciales que pueden requerir cirugía y, en consecuencia, un cambio en la política espacial.12,13. De hecho, las enfermedades quirúrgicas urgentes como la apendicitis y la colecistitis pueden ocurrir sin signos de advertencia.3,14 y prácticamente cualquier evento impredecible que pueda ocurrir fuera de la órbita terrestre es un riesgo para el miembro individual de la tripulación, toda la tripulación y la misión.15. En el espacio, la cirugía requiere protocolos y dispositivos dedicados para el mantenimiento de campos quirúrgicos estériles16,17, así como anestesia adecuada y técnicas quirúrgicas apropiadas. Esta suposición es cierta tanto para la cirugía abierta, la cirugía laparoscópica y la cirugía mínimamente invasiva asistida por robot (RAMIS). Sin embargo, la cirugía laparoscópica y robótica tienen la ventaja de mantener la cavidad abdominal cerrada, evitando la fuga de sangre y fluidos desde su interior a la atmósfera de la nave espacial y contribuyendo al mantenimiento de la temperatura corporal.13. Otra preocupación, además de la posible contaminación de la atmósfera de la nave espacial, es la necesidad de proteger el campo operativo de las partículas presentes en la nave espacial.3,4,13. El mantenimiento de la hemostasia, el despliegue del instrumento y la contención del operador y los pacientes también son necesarios.
Otras posibilidades probadas en cirugía espacial fueron representadas por el uso de un sistema quirúrgico cerrado (dosel)18 para cirugía en animales anestesiados en vuelos parabólicos para evaluar el comportamiento del sangrado arterial y venoso, control del sangrado y prevención de la contaminación atmosférica14. También se han realizado estudios sobre dispositivos de flujo laminar para reducir el riesgo de contaminación de heridas con bacterias patógenas encontradas en la piel y con colonias en la atmósfera de la nave espacial.3,6,18. En cuanto a la contención de fluidos corporales, por un lado, y la prevención de la contaminación del campo quirúrgico por desechos ambientales y bacterias, por otro, la laparoscopia y el RAMIS se consideran efectivos porque pueden separar el campo quirúrgico del medio ambiente manteniendo la integridad de la pared abdominal.4,19. En todos estos estudios realizados sobre cirugía abierta y cirugía laparoscópica durante vuelos parabólicos y en la ISS14,15,17, se encontró que los procedimientos quirúrgicos eran factibles en el espacio, aunque más difíciles de realizar que en la Tierra.20,14. Kirkpatrick et al.19,13 describió el comportamiento de la pared abdominal en laparoscopia que es diferente a 0 g en comparación con lo que ocurre a la gravedad terrestre en un modelo animal (cerdo) durante vuelos parabólicos19,13. La pared abdominal del cerdo mostró un aumento espontáneo de la presión y un cambio de forma, de elipse comprimida a redonda, al entrar en ingravidez. En este estudio19,13 Se compararon dos procedimientos diferentes para la visualización laparoscópica: uno sin insuflación de gas asociada a la retracción de la pared abdominal a través de un dispositivo dedicado, y el otro con insuflación de gas estándar de 15 mmHG19,13. La conclusión fue que la insuflación de gases mejora la visualización y permite mejores condiciones intraabdominales para la cirugía laparoscópica19,13. Para misiones de exploración de larga duración), Robertson et al. en 202021 sugirió un nuevo enfoque de la atención. Teniendo en cuenta que, de hecho, existe un mayor riesgo de lesiones traumáticas en misiones a largo plazo, en la exploración de la superficie planetaria y en las caminatas espaciales, los autores examinaron los eventos médicos con potencial para salvar vidas, su impacto potencial en la salud de la tripulación y el éxito de la misión y desarrollaron una lista de habilidades no técnicas (NTS) para ser utilizadas en la capacitación de gestión médica en vuelo.21. El paro cardíaco repentino, la inhalación de humo, la exposición tóxica, las convulsiones y las lesiones oculares penetrantes fueron los eventos con el mayor impacto potencial en las misiones, y se encontró que NTS era útil para un manejo exitoso. Además, estos hallazgos pueden tener una aplicación también en la Tierra para la atención quirúrgica y médica en lugares rurales y remotos.21.
Notas sobre el oficial médico de la tripulación (CMO)
Actualmente, el CMO es solo un miembro de la tripulación sin antecedentes médicos, con solo 60 h de capacitación médica.22 como el riesgo de una lesión o enfermedad grave en la ISS15 es bajo. Por el contrario, durante los vuelos a largo plazo, es probable que ocurran condiciones como apendicitis, úlcera péptica y obstrucción intestinal incluso en miembros sanos de la tripulación.14, además de lesiones traumáticas. Estos últimos pueden repercutir en la misión en la medida en que pueden causar su fracaso.3,7,15,17.
Dado que en misiones a largo plazo o misiones a Marte, se espera que los traumatismos y las enfermedades quirúrgicas de emergencia requieran tratamiento en el acto, ya que regresar a la Tierra tomaría ~ 9 meses4,15 tanto el CMO como la tripulación necesitan tener capacidades quirúrgicas y médicas más amplias3,17,20,22,23. Una selección y capacitación médica dedicada es, por ahora, la política elegida para misiones de clase de exploración y en vuelos espaciales a largo plazo, el CMO también debe tener un asistente médico capacitado que pueda reemplazarlo si es necesario.9,17,22,23,24 (Lesión grave, enfermedad o muerte por CMO).
Cirugía robótica en el espacio
Dado que la cirugía robótica en el espacio es el tema central de la revisión, es necesario explorar algunos aspectos. Uno de ellos son los problemas de comunicación. Comunicaciones y navegación espacial de la NASA (SCaN)25 permite el intercambio de datos, con astronautas a bordo de la ISS, así como con rovers en Marte y las misiones Artemisa a la Luna. La NASA tiene una extensa red de antenas en todos los continentes para recibir transmisiones de naves espaciales y también puede confiar en satélites de retransmisión para llevar sus datos al suelo. Los satélites de seguimiento y retransmisión de datos enviarán datos a través de orbitadores alrededor de Marte, que envían los datos a la Tierra. El ancho de banda con varias bandas de frecuencias electromagnéticas está disponible con diferentes capacidades.
Los anchos de banda más altos pueden transportar más datos por segundo, pero un sistema para comunicarse con láseres infrarrojos26 se espera que se lance en 2021 que revolucionará las comunicaciones hacia y desde el espacio, tema que no se incluye en esta revisión. Por ahora, el ancho de banda no es la única restricción para las tasas de flujo de datos, ya que las comunicaciones no ocurren instantáneamente: la velocidad de la luz es su límite, alrededor de 186,000 millas por segundo o 299,792 km por segundo. Para las naves espaciales cercanas a la Tierra, este retraso de tiempo, o latencia de comunicaciones, es casi insignificante. Más lejos de la Tierra, sin embargo, la latencia se convierte en un problema. Cuando Marte está más cerca de la Tierra, a unos 35 millones de millas de distancia, 56,327,000 km, el retraso es de aproximadamente 4 minutos. A su mayor distancia, a unos 250 millones de millas de distancia, 402,300,000 km, el retraso es de alrededor de 24 minutos.25. Esto significa que la comunicación varía de 4 a 24 minutos de retraso para llegar al Control de la Misión. Y otros 4 a 24 min para recibir su respuesta dependiendo de la distancia entre los dos planetas25.
Además, la calidad de la transmisión de comunicaciones que viajan largas distancias o a través de la atmósfera, puede deteriorarse, distorsionando el mensaje. También la radiación del sol u otros planetas puede interferir25. La acumulación de estas condiciones adversas puede afectar seriamente a la cirugía robótica en el espacio, comprometiendo la señal desde y hacia la Tierra y, en consecuencia, cualquier acción en tiempo real.25.
Consejos sobre telemedicina
Se han realizado muchos estudios para probar la posibilidad de telementoring en la cirugía espacial. La telementoría a larga distancia puede ser la única forma disponible de ayuda médica en la exploración espacial. Sus aplicaciones dependen de los diferentes tipos de misión y distancias desde la Tierra y de la calidad de la tecnología de la comunicación.25,27,28,29,30. Aunque la mayoría de los avances tecnológicos cubiertos en esta sección son aplicables a órbitas terrestres bajas (LEO) o terrestres geoestacionarias (GEO), a distancias más largas, como en la Luna o Marte, ninguna de las tecnologías de comunicación actuales puede reducir la latencia.25. En una publicación de 2011 Haidegger et al.31, hizo un repaso sobre las diversas posibilidades de teleasistencia en relación con la distancia. La telemedicina puede ser en línea y fuera de línea dependiendo de la calidad del enlace, y ofrece varias modalidades: la telemedicina de almacenamiento y reenvío es exclusivamente una comunicación unidireccional a la vez, sin embargo, mejorable a través de monitoreo remoto o telepresencia interactiva.31. En caso de que la conexión no sea confiable, un cirujano remoto aún puede comunicarse con un colega local gracias a la transmisión de video y voz desde la sala de operaciones. Esta modalidad, o telementoring, también se denomina «telemedicina de consultoría» o «telesalud de consultoría«31.
Operaciones de misiones de ambiente extremo de la NASA, las «misiones NEEMO»
Se han llevado a cabo experimentos de telementoría en las misiones NEEMO32, un programa de piedra angular mediante el cual la NASA ha enviado astronautas a vivir en el laboratorio Aquarius bajo el agua desde 2001.32. La 7ª misión tuvo lugar en 200432,33, la 9ª misión en 200632,34 y el 12º en 200732,35, con especial atención a la telemedicina. Cada uno generalmente duraba de 7 a 14 días. Aquarius es la única estación de investigación submarina del mundo, con un hábitat aproximadamente del tamaño de la ISS, lo suficientemente grande como para acomodar a seis miembros (acuanautas). Una boya dedicada suministra al módulo energía, soporte vital y comunicaciones a través de umbilicales32.
Las misiones NEEMO fueron diseñadas expresamente para probar la telemedicina asistida por robots quirúrgicos. Por ejemplo, el robot AESOP (ZEUS) se utilizó en la 7ª misión, un robot M7 en la 9ª y un M7 y un robot Raven en la 12ª misión. Algunas tareas quirúrgicas se exploraron con la ayuda de la telementoría y la tecnología quirúrgica telerobótica.
En el día 7, los participantes recibieron una formación quirúrgica mínima para evaluar la utilidad de la telementoría. El 9º NEEMO se centró en la cirugía abdominal en tiempo real en un simulador de pacientes para desarrollar habilidades de tripulación. La latencia de la señal, la configuración de 750 ms y un retraso de hasta 3 s, se utilizaron para imitar los enlaces de comunicación Luna-Tierra. En la 12ª misión, se realizaron algunas suturas en un fantasma en condiciones simuladas de gravedad cero por tres cirujanos que guiaron los movimientos del robot a través de una computadora desde una ubicación remota. Todas las misiones demostraron el valor de la teletutoría y la viabilidad de la cirugía teleoperada a distancia, siempre que se disponga de conexiones de comunicación eficaces32,33,34,35.
Estudios sobre cirugía mínimamente invasiva asistida por robot (RAMIS)
Como se informó anteriormente, el uso de un robot quirúrgico podría ser una ventaja en la cirugía espacial. Es bien sabido en la Tierra que la tecnología robótica es capaz de ampliar la destreza y las capacidades del cirujano para realizar muchos tipos de procedimientos complejos a través de pequeñas incisiones con la ayuda de instrumentos quirúrgicos dedicados. Los robots quirúrgicos utilizados en la actividad clínica son dispositivos de telecirugía maestro-esclavo (Robotic-Assisted Minimally Invasive Surgery-RAMIS) totalmente teleoperados por el cirujano, a cargo de la planificación de nivel superior y la toma de decisiones cognitivas, mientras que los robots son responsables solo de la implementación mecánica.36,37. Su peculiaridad es la presencia de «un control humano-en-el-bucle»5,6,36,37 y la seguridad es proporcionada por el cirujano que realiza el procedimiento. Una evolución de esta condición es la posibilidad de beneficiarse de características especiales y efectores.5. Haidegger6, en su artículo de 2019, hizo un excursus sobre la evolución de la autonomía del robot quirúrgico. Hasta hoy, los sistemas teleoperados en uso, aunque ofrecen nuevas soluciones curativas para enfermedades complejas, no son capaces de ejecutar tareas autónomas o tomar decisiones cognitivas. La introducción de procedimientos más difíciles y avances tecnológicos en cirugía integrada por computadora (es decir, «el campo de las tecnologías médicas intervencionistas, desde la guía de imágenes médicas y las aplicaciones de realidad aumentada (AR) hasta la ablación automatizada de tejidos»)6 ha llevado al desarrollo de la interacción humano-robot, es decir, la transferencia de conocimientos relacionados con tareas entre humanos y robots, lo que representa un gran avance en este campo. Este esfuerzo está fuertemente relacionado con la cirugía espacial, ya que la presencia de un CMO calificado y capacitado no puede darse por sentado e incluso cuando él / ella está presente, un asistente para apoyarlo es obligatorio, como lo afirman Gao et al.38. Estos autores informaron que, además de los avances en robótica que han permitido la exploración en ambientes hostiles en el espacio, apoyando las operaciones de los astronautas, la robótica ha ayudado a reducir significativamente la carga cognitiva en los humanos de la abundancia de decisiones críticas que deben tomarse de manera oportuna para garantizar la seguridad.39. Dependiendo de las distancias entre la nave espacial y el Centro de Control de Tierra, diferentes tecnologías de telepresencia pueden proporcionar el mejor rendimiento.30,36,37 entre la telecirugía, la cirugía guiada por imágenes y la robótica quirúrgica controlada cooperativamente. La recopilación de datos fisiológicos y de imágenes pre e intraoperatorias proporcionará al robot quirúrgico información para obtener más autonomía, objetivo futuro de la investigación terrestre y espacial.30,36,37. Takács et al.36,37 informó sobre el retraso de la señal entre la Tierra y la Luna, y entre la Tierra y Marte. La telecirugía semi-en tiempo real se puede utilizar dentro de la distancia Tierra-Luna. En caso de una emergencia quirúrgica lejos de la órbita de la Tierra, se necesitan soluciones alternativas para mantener la viabilidad de la telecirugía hasta 2 s de retraso.36,37. Se han considerado pantallas predictivas que proyectan los movimientos previstos del robot hacia adelante en el tiempo hasta un máximo de 2 segundos de retraso, estirando las capacidades humanas hasta los límites, ya que los cirujanos de latencia por encima de 250-300 ms se desempeñan peor.36,37.
La oportunidad de tener un CMO capacitado para todos los pacientes de naves espaciales en la nave espacial en la misión en el espacio profundo, se considera la mejor opción en la literatura. La ayuda en tierra será proporcionada por cirujanos asesores, además de almacenar y enviar los datos.6,35, intercambio de imágenes fijas, vídeos en movimiento, conferencias de voz y chats electrónicos para completar los análisis. El objetivo es tener un «sistema médico inteligente» que ayude al CMO con el diagnóstico, monitoreo y tratamiento de los miembros enfermos de la tripulación.6,35. La posibilidad de consultar una biblioteca dedicada para encontrar apoyo en caso de eventos particularmente desafiantes también es una buena opción para el CMO. También se dispondrá de sistemas de navegación quirúrgica y de realidad aumentada y se proporcionarán varios sensores táctiles y de fuerza para determinar las propiedades mecánicas de los tejidos y las consistencias para la disección.6,36,37. En cuanto a los avances actuales en RAMIS, Cornejo et al.40 Informe sobre nuevos logros en robótica médica y cirugía espacial. El «Space Biosurgeon» está concebido para proporcionar apoyo en procedimientos quirúrgicos laparoscópicos avanzados teleoperados aplicados para cirugía asistida por robot general y gastrointestinal.
Este sistema está compuesto por una consola para el cirujano «SurgiConsole» y una plataforma robótica «Surgi Platform». El diseño conceptual de Biosurgeon fue desarrollado para lograr una alineación natural del ojo, la mano y los instrumentos, mejorar la destreza motora quirúrgica, minimizar la invasividad, mejorar la ergonomía quirúrgica, la viabilidad, la seguridad y reducir los riesgos.
Además, se han propuesto otros sistemas quirúrgicos para aplicación quirúrgica en misiones espaciales de larga distancia. La «cápsula de trauma», originalmente diseñada para operaciones militares y desastres naturales para diagnósticos críticos y procedimientos rápidos para salvar vidas en los heridos graves24, se utilizará cuando no se disponga de un despliegue oportuno del personal médico adecuado y el paciente no pueda ser evacuado rápidamente a un centro médico apropiado. La plataforma se utilizará para asegurar las vías respiratorias, insertar una vía intravenosa o intraósea, realizar hemostasia, manipular tejidos dañados y posicionar dispositivos de monitorización.24.
El RAVEN, (Bio Robotics Lab. University of Washington, Seattle WA) con un peso de solo 22 kg que opera según el mismo principio que el sistema DaVinci, tiene dos brazos articulados accionados por tendones y puede ser fácilmente ensamblado incluso por personas que no son ingenieros suministradas con enlaces de comunicación para control remoto a larga distancia.36,41.
Otros ejemplos de robots versátiles como Robonaut242,43 fueron probados para su uso en procedimientos médicos. Investigadores del Centro Espacial Johnson de la NASA, en colaboración con General Motors y Oceaneering, designaron a este robot humanoide altamente diestro para su empleo en una variedad de aplicaciones médicas, desde la telemedicina hasta la gestión médica, ya sea en modo autónomo o de teleoperación.43. Además, el Instituto de Cognición Humana y Artificial de Florida organizó recientemente el «Blue Sky Meeting», con el objetivo de explorar el papel de la robótica en la cirugía en los vuelos de exploración espacial.42,43,44.
El simposio ofreció un excursus sobre el posible uso de robots diestros inspirados en el ser humano como asistentes médico-quirúrgicos efectivos y sobre los avances en cirugía espacial.
Discusión
Es una suposición establecida que tanto en misiones a largo plazo como en misiones a otro planeta, la atención médica y quirúrgica aguda necesita una gran autonomía y también un amplio conocimiento médico y quirúrgico, debido a las dificultades en las comunicaciones con la Tierra que crecen con la distancia. Cualquier lesión impredecible o evento médico que pueda ocurrir fuera de la órbita terrestre es un riesgo para el miembro individual de la tripulación, toda la tripulación y la misión misma. La imposibilidad de un pronto regreso a la Tierra, como en la ISS, provocó un cambio de paradigma en cómo enfrentar la emergencia en misiones espaciales y misiones a otros planetas. Según lo informado por Robertson et al.21 La planificación cuidadosa de las condiciones de salud más críticas y su tratamiento puede ayudar no solo a los eventos de alta luz con el mayor potencial de impacto adverso en las misiones, así como el mayor potencial de supervivencia, sino que también puede prever NTS que pueden ser necesarios para enfrentar estas condiciones.
La ausencia de gravedad en los viajes a otro planeta también es un campo investigado. Aunque hay estudios sobre la adaptación a 1G al entrar en una misión, las posibles consecuencias son difíciles de descifrar.6,45 después de aterrizar en Marte, donde está presente una gravedad más baja que en la Tierra (0,376 g). La presión atmosférica es una pequeña fracción, con un promedio de 7,5 milibares, de lo que es en la Tierra, más de 1000 milibares, otra variación que debe tenerse en cuenta.
Además, dado que las misiones a Marte durarán ~ 3 años, teniendo en cuenta el viaje y el tiempo pasado en el planeta, es más probable que ocurran emergencias quirúrgicas o traumas.18,20,46. La posibilidad de usar AR47,48,49 y Realidad virtual49 Podría ser una posibilidad útil para que los astronautas se cuiden a sí mismos en este entorno hostil y extremadamente remoto. Estas herramientas pueden implementar y mantener las habilidades de CMO y miembros de la tripulación en cirugía y atención médica.46.
Se están investigando desarrollos avanzados hacia sistemas más autónomos capaces de ayudar a la tripulación y al CMO.
En la cirugía espacial, alejándose de la Tierra, incluso un CMO calificado y capacitado puede encontrarse solo en el proceso de toma de decisiones. Es posible que no necesariamente tenga todos los conocimientos necesarios para manejar cualquier evento de salud inesperado. En tales casos, el uso de recursos computarizados altamente innovadores puede ser extremadamente útil.
En este sentido, la mejora de RAMIS engloba la reciente propuesta de un «Biocirujano Espacial»40, un sistema quirúrgico robótico teleoperado que requiere que tanto el cirujano como el robot estén en el mismo lugar.
Además de la cirugía robótica y los avances en el asentamiento y la exploración espacial, se han destacado otros temas en este documento, como la indicación de Blue Sky Meeting de la posibilidad de utilizar robots diestros inspirados en humanos para vuelos de exploración espacial.42,43 para superar los desafíos médicos y quirúrgicos y considerar aplicaciones futuras innovadoras (IA, Machine Learning).
En resumen, las aplicaciones deseables de un sistema robótico en un vuelo espacial deben ser las siguientes: en primer lugar, debe estar preprogramado para procedimientos quirúrgicos básicos, como la sutura; en segundo lugar, debe tener un sistema autónomo guiado por imágenes para poder emplear ultrasonidos, resonancias magnéticas o tomografías computarizadas y estar listo para la toma de decisiones en tiempo real.41. Otras tareas incluirán proporcionar un apoyo para la anestesia, el monitoreo de los signos vitales y la atención postoperatoria.
Finalmente, se deben prever programas y equipos dedicados de recuperación postraumática para los astronautas que sufren lesiones sustanciales.50,51. Tales terapias deben planificarse para misiones a largo plazo y, entre los instrumentos a bordo, también debe estar presente un dispositivo dedicado (hardware y software de computadora) para implementarlas, ya que hay evidencia en la literatura de terapias e instrumentos de rehabilitación para el trauma de las extremidades superiores que se han probado en astronautas en condiciones de microgravedad.50,51.
Los robots quirúrgicos multifuncionales, capaces de realizar procedimientos de forma autónoma, son la nueva frontera. La investigación adicional en este campo proporcionará nuevos conocimientos sobre la salud humana en el espacio, así como ideas innovadoras para aplicaciones clínicas en la Tierra.

gracias por el comentario
Me gustaMe gusta